Measuring the Effect of Background on Classification and Feature Importance in Deep Learning for AV Perception (Sielemann, Barner et al., 2025)
datasets
classes
images per dataset
total images
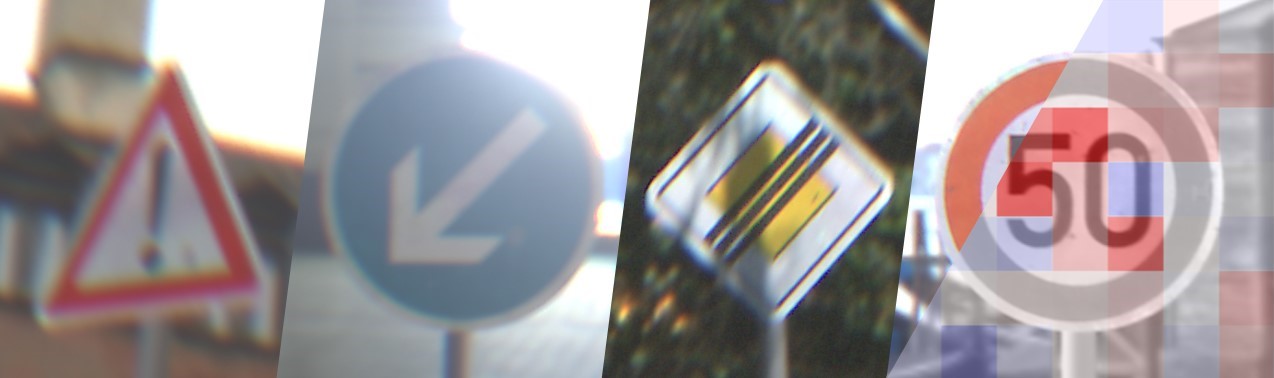
A major advantage of synthetic data is their parameterizability: our Synset Signset rendering pipeline for generating synthetic traffic sign images allows one to precisely specify the random distributions from which the images are sampled. Additionally, the exact parameter configuration is known for each individual image. Due to these properties, synthetic data are not only suitable for training machine learning (ML) approaches, as demonstrated in our previous work on Synset Signset Germany, but can also be used to systematically test ML approaches or tools, as long as a sufficient degree of realism and variance is ensured. On that basis, this work aims to systematically investigate a common assumption used by explainable AI (XAI) methods.
Common approaches to XAI for deep learning (DL) -based image classification focus on analyzing the importance of input features on the classification task in a given model: saliency methods like SHAP1 and GradCAM2 are used to measure the impact of spatial regions of the input image on the classification result. Combined with ground truth information about the location of the object in the input image, for example, a binary mask, it is determined whether object pixels had a high impact on the classification result, or whether the classification focused on background pixels. The former is considered to be a sign of a healthy classifier, whereas the latter is assumed to suggest overfitting on spurious correlations.
A major challenge, however, is that these intuitive interpretations are difficult to test quantitatively, and hence the output of such explanations lacks explanation itself. One particular reason is that correlations in real-world data are difficult to avoid, and whether they are spurious or legitimate is debatable. To shed light on this issue and test whether feature importance-based XAI reliably distinguishes between true learning and problematic overfitting, we utilize the task of traffic sign recognition. Based on the synthesis pipeline of the Synset Signset Germany dataset, which demonstrated comparability to real-world data, we show how systematically generated synthetic data can test assumptions about feature importance-based XAI and isolate factors between classification quality and XAI values.
Synset Background Effect Datasets
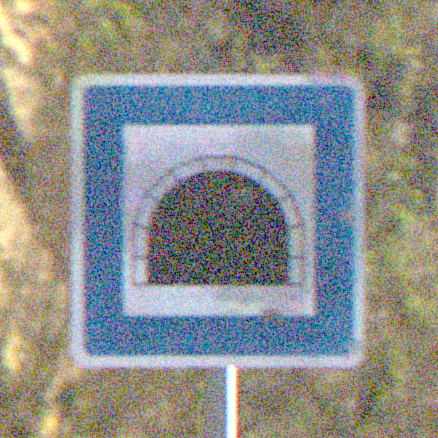
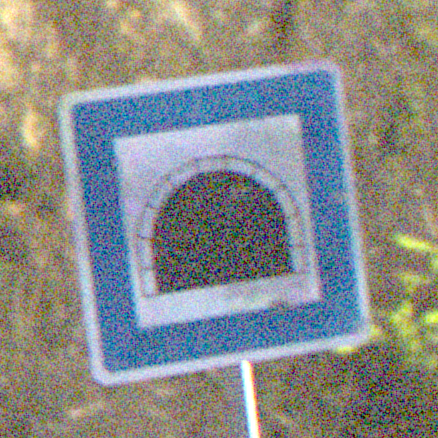
Therefore, we systematically generated six synthetic datasets for the task of traffic sign recognition, which differ only in their degree of camera variation and background correlation. Thereby, a correlated background means that each traffic sign is depicted in its most probable environment according to German traffic code / regulation StVO3 (Straßenverkehrs-Ordnung) categorized in urban, nature, and urban and nature. A traffic sign warning of wildlife crossing is, for example, likely to be set up on a rural road with natural background, while a sign warning of pedestrians is probable to be placed in an urban context. An uncorrelated background, however, means that the background is randomly chosen and thus not semantically linked to the depicted traffic sign class.
Datasets with uncorrelated background





Frontal camera perspective






Medium camera variation





High camera variation
Datasets with correlated background






Frontal camera perspective






Medium camera variation






High camera variation
Details
| Field | Task | License | Samples | Key Annotations | Institutions |
|---|---|---|---|---|---|
| Computer Vision | traffic sign recognition |  Creative Commons Attribution 4.0 | 90,200 images per dataset, 541,200 images in total | Per frame: Class (sign type), environment conditions (e.g., time of day, contrast), imaging artifacts (noise, motion blur, chromatic aberration), semantic segmentation, binary mask. | Fraunhofer IOSB, KIT-IES |
More examples for variations and features (expand)





















Traffic sign selection (expand)
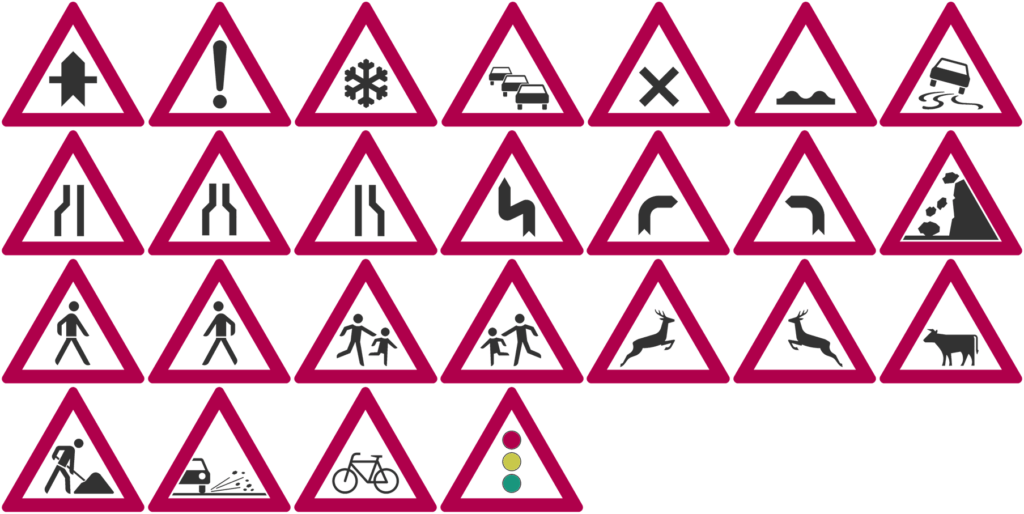
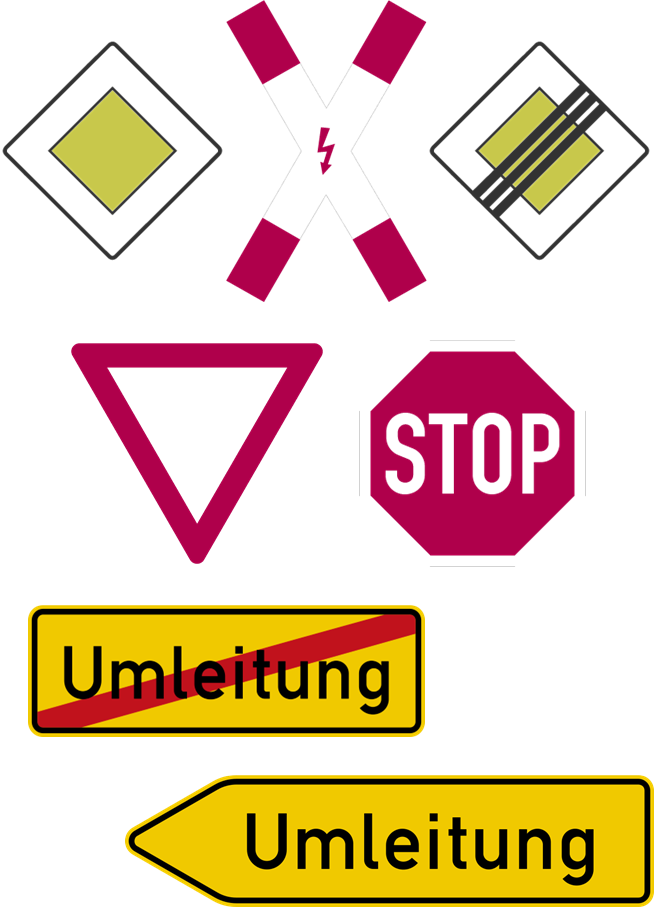
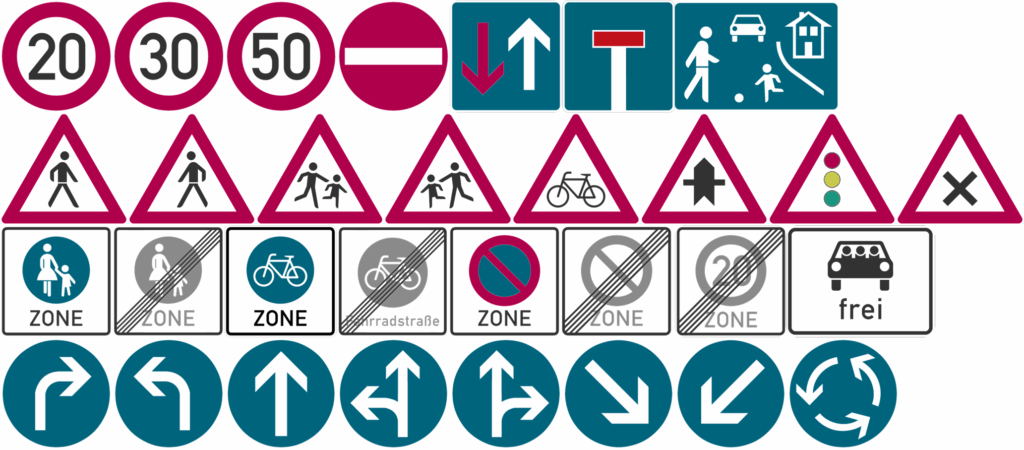
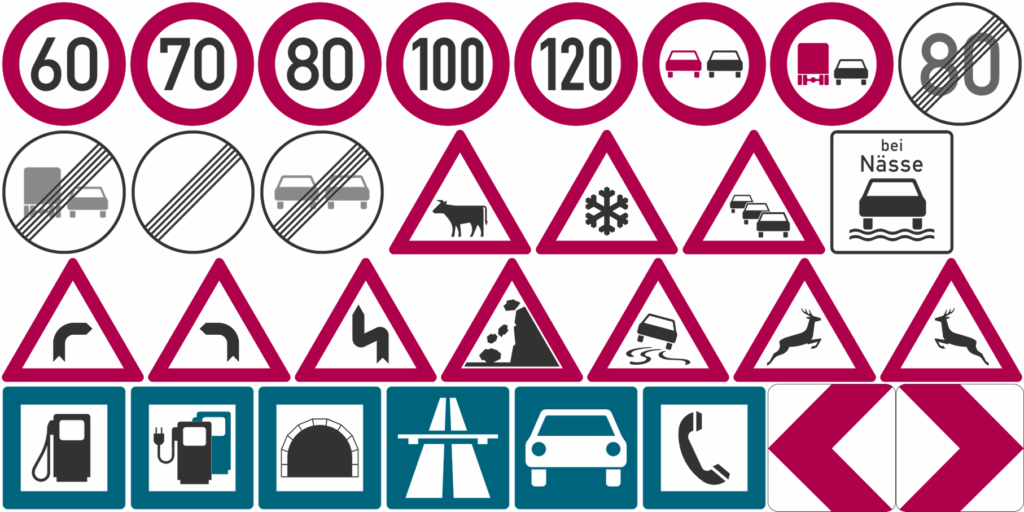
The Synset Background Effect datasets contain a total of 82 traffic sign classes. We selected the included classes with great care, as we aimed for some properties to be evenly distributed across the dataset. This comprises the traffic sign shapes. The datasets include 25 circular, triangular, and rectangular traffic signs each. Furthermore, seven traffic signs of various shapes were added.
circular
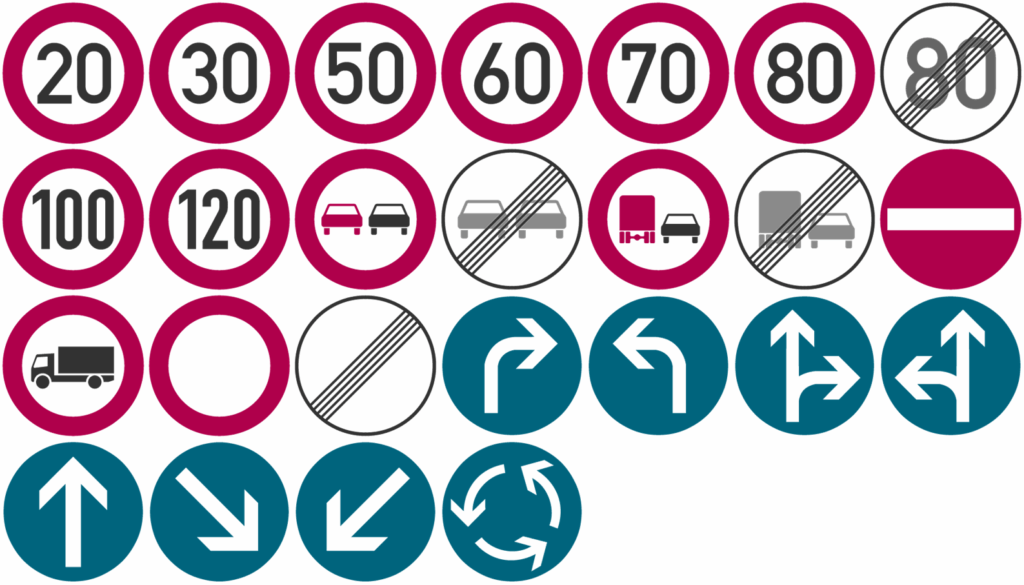
triangular
rectangular
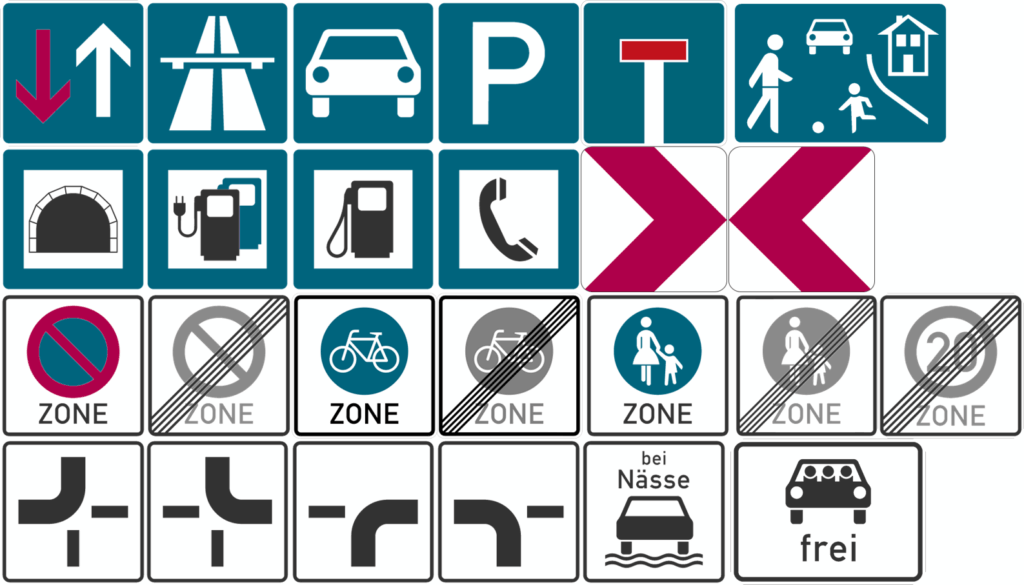
various
Almost the same number of traffic signs to be most probable in an urban and natural environment are included in the datasets. Additionally, some traffic signs are likely to appear in urban as well as natural environments. For all classes of traffic sign shapes as well as probable environments, we aimed to distribute the appearing colors evenly when possible, to prevent trained networks from overfitting on color details.
urban
nature
urban and nature
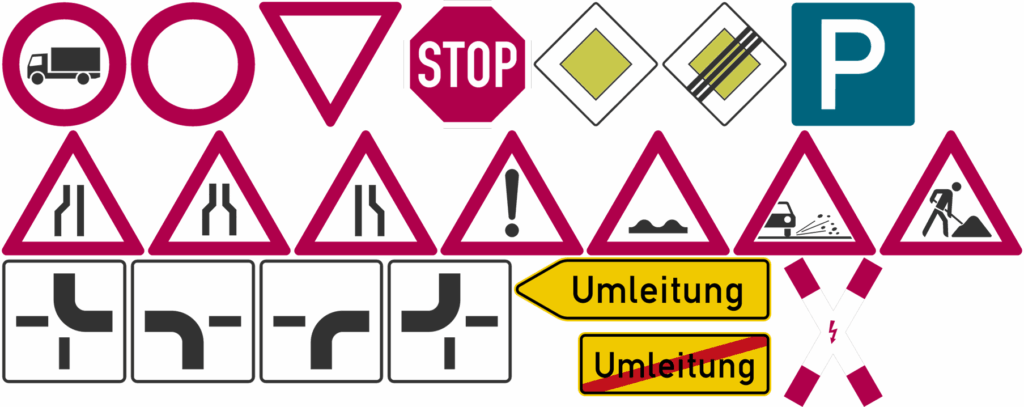
For all traffic sign shapes, we included traffic sign classes that are likely to be confused with each other. This applies, e.g., to classes that only differ in vertical mirroring or local details.
The first 43 classes aim to represent a “synthetic twin” of the well-known “German Traffic Sign Recognition Benchmark“ (GTSRB)1 dataset. Their IDs directly match the traffic sign IDs of GTSRB.
1 J. Stallkamp, M. Schlipsing, J. Salmen, and C. Igel, “The German traffic sign recognition benchmark: a multi-class classification competition,”
in The 2011 international joint conference on neural networks. IEEE, 2011, pp. 1453–1460.
| ID | Name | Image |
|---|---|---|
| 0 | Zulässige Höchstgeschwindigkeit 20 | |
| 1 | Zulässige Höchstgeschwindigkeit 30 | |
| 2 | Zulässige Höchstgeschwindigkeit 50 | |
| 3 | Zulässige Höchstgeschwindigkeit 60 | |
| 4 | Zulässige Höchstgeschwindigkeit 70 | |
| 5 | Zulässige Höchstgeschwindigkeit 80 | |
| 6 | Ende der zulässigen Höchstgeschwindigkeit 80 | |
| 7 | Zulässige Höchstgeschwindigkeit 100 | |
| 8 | Zulässige Höchstgeschwindigkeit 120 | |
| 9 | Überholverbot für Kraftfahrzeuge aller Art | |
| 10 | Überholverbot für Kraftfahrzeuge über 3,5 t | |
| 11 | Vorfahrt | |
| 12 | Vorfahrtstraße | |
| 13 | Vorfahrt gewähren | |
| 14 | Halt. Vorfahrt gewähren | |
| 15 | Verbot für Fahrzeuge aller Art | |
| 16 | Verbot für Kraftfahrzeuge über 3,5 t | |
| 17 | Verbot der Einfahrt | |
| 18 | Gefahrenstelle | |
| 19 | Kurve – links | |
| 20 | Kurve – rechts | |
| 21 | Doppelkurve – zunächst links | |
| 22 | Unebene Fahrbahn | |
| 23 | Schleuder- oder Rutschgefahr | |
| 24 | Einseitig verengte Fahrbahn – Verengung rechts | |
| 25 | Arbeitsstelle | |
| 26 | Lichtzeichenanlage | |
| 27 | Fußgänger – Aufstellung rechts |
| ID | Name | Image |
|---|---|---|
| 28 | Kinder – Aufstellung rechts | |
| 29 | Radverkehr – Aufstellung rechts | |
| 30 | Schnee- oder Eisglätte | |
| 31 | Wildwechsel – Aufstellung rechts | |
| 32 | Ende sämtlicher streckenbezogener Geschwindigkeitsbeschränkungen und Überholverbote | |
| 33 | Vorgeschriebene Fahrtrichtung – rechts | |
| 34 | Vorgeschriebene Fahrtrichtung – links | |
| 35 | Vorgeschriebene Fahrtrichtung – geradeaus | |
| 36 | Vorgeschriebene Fahrtrichtung – geradeaus oder rechts | |
| 37 | Vorgeschriebene Fahrtrichtung – geradeaus oder links | |
| 38 | Vorgeschriebene Vorbeifahrt – rechts vorbei | |
| 39 | Vorgeschriebene Vorbeifahrt – links vorbei | |
| 40 | Kreisverkehr | |
| 41 | Ende des Überholverbotes für Kraftfahrzeuge aller Art | |
| 42 | Ende des Überholverbotes für Kraftfahrzeuge über 3,5 t | |
| 43 | Fußgänger – Aufstellung links | |
| 44 | Kinder – Aufstellung links | |
| 45 | Wildwechsel – Aufstellung links | |
| 46 | Verengte Fahrbahn | |
| 47 | Einseitig verengte Fahrbahn – Verengung links | |
| 48 | Viehtrieb – Aufstellung rechts | |
| 49 | Steinschlag – Aufstellung rechts | |
| 50 | Splitt, Schotter | |
| 51 | Kreuzung oder Einmündung | |
| 52 | Stau | |
| 53 | Beginn einer Fußgängerzone | |
| 54 | Ende einer Fußgängerzone |
| ID | Name | Image |
|---|---|---|
| 55 | Ende einer Tempo 20-Zone in verkehrsberuhigten Geschäftsbereichen | |
| 56 | Ende der Vorfahrtstraße | |
| 57 | Vorrang vor dem Gegenverkehr | |
| 58 | Beginn eines verkehrsberuhigten Bereichs | |
| 59 | Tunnel | |
| 60 | Autobahn | |
| 61 | Kraftfahrstraße | |
| 62 | Sackgasse | |
| 63 | Umleitungswegweiser, linksweisend | |
| 64 | Ende der Umleitungsankündigung | |
| 65 | Richtungstafel in Kurven (Aufstellung rechts) | |
| 66 | Richtungstafel in Kurven (Aufstellung links) | |
| 67 | Beginn einer Fahrradzone | |
| 68 | Ende einer Fahrradzone | |
| 69 | Mehrfachbesetzte Personenkraftwagen frei | |
| 70 | Bei Nässe | |
| 71 | Verlauf der Vorfahrtstraße an Kreuzungen von oben nach links | |
| 72 | Verlauf der Vorfahrtstraße an Kreuzungen von oben nach rechts | |
| 73 | Verlauf der Vorfahrtstraße von unten nach links, Einmündung von rechts | |
| 74 | Verlauf der Vorfahrtstraße von unten nach rechts, Einmündung von links | |
| 75 | Beginn eines eingeschränkten Haltverbotes für eine Zone | |
| 76 | Ende eines eingeschränkten Haltverbotes für eine Zone | |
| 77 | Parken | |
| 78 | Andreaskreuz | |
| 79 | Fernsprecher | |
| 80 | Tankstelle | |
| 81 | Ladestation für Elektrofahrzeuge |
Environment selection (expand)
All HDRIs used by the rendering pipeline for lighting and background modulation stem from Polyhaven1. Both sets of natural and urban environment maps contain 70 maps each; their names are given in the following tabulars.
Nature
| Abandoned Pathway | Goegap Road | Rustig Koppie |
| Arboretum | Greenwich Park 03 | Schachen Forest |
| Autumn Field | Industrial Sunset 02 | Signal Hill Dawn |
| Autumn Forest 01 | Je Gray 02 | Signal Hill Sunrise |
| Autumn Meadow | Lakes | Simons Town Road |
| Autumn Road | Leibstadt | Small Rural Road |
| Beach Parking | Lilienstein | Small Rural Road 02 |
| Bismarckturm | Mealie Road | Straw Rolls Field 01 |
| Cedar Bridge | Narrow Moonlit Road | Street Lamp |
| Chapmans Drive | Near The River 02 | Sunflowers |
| Clarens Midday | Niederwihl Forest | Sunny Vondelpark |
| Cliffside | Orbita | Tief Etz |
| Crosswalk | Ostrich Road | Tiergarten |
| Derelict Highway Midday | Park Parking | Turning Area |
| Derelict Highway Noon | Pink Sunrise | Versveldpas |
| Derelict Overpass | Red Hill Cloudy | Victoria Curve 01 |
| Dikhololo Night | Red Hill Curve | Victoria Curve 02 |
| Dry Orchard Meadow | Red Hill Straight | Victoria Sunset |
| Etzwihl | Rogland Clear Night | Waterbuck Trail |
| Evening Field | Rosendal Plains 2 | Wide Street 02 |
| Evening Road 01 | Ruckenkreuz | Winter River |
| Flower Road | Rural Asphalt Road | Woods |
| Fouriesburg Mountain Cloudy | Rural Winter Roadside | Yellow Field |
| Glencairn Expressway |
Urban
| Belvedere | Neuer Zollhof | Stuttgart Suburbs |
| Bethnal Green Entrance | Night Bridge | St Peters Square Night |
| Blaubeuren Church Square | Old Apartments Walkway | Suburban Parking Area |
| Buikslotermeerplein | Outdoor Umbrellas | Sunset Jhbcentral |
| Cambridge | Palermo Sidewalk | Tears Of Steel Bridge |
| Canary Wharf | Palermo Square | Teatro Massimo |
| Cloudy Cliffside Road | Parking Garage | Teufelsberg Ground 2 |
| Cobblestone Street Night | Paul Lobe Haus | Ulmer Muenster |
| Construction Yard | Piazza Bologni | Urban Alley 01 |
| Courtyard | Piazza San Marco | Urban Courtyard |
| Courtyard Night | Portland Landing Pad | Urban Courtyard 02 |
| Dresden Square | Potsdamer Platz | Urban Street 01 |
| Dusseldorf Bridge | Quattro Canti | Urban Street 02 |
| Future Parking | Rathaus | Urban Street 03 |
| Golden Bay | Red Wall | Urban Street 04 |
| Hamburg Canal | Residential Garden | Vatican Road |
| Hansaplatz | Rotes Rathaus | Venetian Crossroads |
| Konigsallee | San Giuseppe Bridge | Venice Dawn 2 |
| Konzerthaus | Schadowplatz | Venice Sunrise |
| Leadenhall Market | Shanghai Bund | Vignaioli |
| Limehouse | Skylit Garage | Vignaioli Night |
| Modern Buildings | Spree Bank | Wide Street 01 |
| Modern Buildings 2 | Stone Alley 03 | Zwinger Night |
| Modern Buildings Night |
Metadata and label details (expand)
Mask images
The mask images mark all image areas showing the depicted traffic sign. They are given as binary png images containing only black and white pixels.
| Class | R | G | B | Hex | |
|---|---|---|---|---|---|
| Background | 0 | 0 | 0 | #000000 | |
| Foreground traffic sign shape | 255 | 255 | 255 | #ffffff |



OGRE3D images

Semantic label images

Mask images
Semantic label images
The label images mark the different areas of the traffic sign itself, which enables to reconstruct the clean traffic sign and furthermore the sky, the traffic sign pole, other traffic signs, and tree parts that protrude into the picture. The labels are assigned as follows:
| Class | R | G | B | Hex | |
|---|---|---|---|---|---|
| Black areas of the traffic sign | 50 | 50 | 50 | #323232 | |
| White areas of the traffic sign | 255 | 255 | 255 | #ffffff | |
| Red areas of the traffic sign | 175 | 0 | 75 | #af004b | |
| Orange areas of the traffic sign | 225 | 125 | 25 | #e17d19 | |
| Yellow areas of the traffic sign | 200 | 200 | 75 | #c8c84b | |
| Blue areas of the traffic sign | 0 | 100 | 125 | #00647d | |
| Green areas of the traffic sign | 25 | 150 | 125 | #19967d | |
| Tree | 50 | 200 | 158 | #32C89E | |
| Sky | 150 | 200 | 200 | #96c8c8 | |
| Traffic sign pole | 125 | 25 | 75 | #7d194b |
JSON files
For each image the Synset Background Effect datasets contain a json file with the corresponding metadata. The json files include:
| name | range | example | description |
|---|---|---|---|
| dataset | “Synset Signset – Effect of Background – “ x [“Train”, “Test”] x [“Correlated”, “Uncorrelated”] x [“Frontal”, “Medium”, “High”] | Synset Signset – Effect of Background – Test Correlated High | Identifier of the (sub-)datasets. |
| image.baseID | [0, …, 599] | 349 | Image’s base ID. Is between 0 and 499 (train datasets) / 599 (test datasets). |
| image.path | relative file path | 11_Vorfahrt/9_img.png | Relative path to the image to which the json file refers. |
| image.width | [100, …, 499] | 208 | Width of the corresponding image. |
| image.height | [100, …, 499] | 208 | Height of the corresponding image. |
| geometry.renderingEngine | OCTAS/OGRE3D | OCTANE/OGRE3D | For all images of these datasets the OGRE3D render enigen (rasterization) was used. |
| geometry.trafficSignClass | [0, …, 81] one of the 82 traffic sign classes | 17 | Defines the depicted traffic sign’s class as id. All available IDs can be looked up in the previous section “Traffic sign selection”. |
| geometry.upperSign | None | None | Traffic signs don’t have additional upper signs in these datasets. |
| geometry.lowerSign | None | None | Traffic signs don’t have additional lower signs in these datasets. |
| environment.name | See previous section “Environment selection” | Skylit Garage | Name of the used Polyhaven environment map. In total, 140 different environment maps where used for the dataset generation (see previous section). |
| environment.dayTime | MorningAfternoon, SunriseSunset, Midday, Night, ‘NotSpecified | Midday | Depicted time of day. |
| environment.basicLocation | Indoor, Outdoor | Outdoor | Depicted basic location. |
| environment.detailedLocation | Urban, Suburban, Road, Nature | Suburban | Depicted detailed location. |
| environment.weather | Clear, Overcast, PartlyCloudy, NotSpecified | PartlyCloudy | Basic weather information. |
| environment.contrast | LowContrast, MediumContrast, HighContrast | HighContrast | Specified environment contrast. |
| environment.light | Natural, Artificial, NotSpecified | Natural | Depicted light type. Indoor and night environments are typicalle illuminated by artificial light. |
| environment.season | Autumn, Winter, NotSpecified | Summer | Depicted season. Unfortunately, this information is not available for some of the environment maps. |
| imageEffects.chromaticAberration.angle | [0.0, 2·pi) | 1.1600300557619123 | Used angle for chromatic aberration given in radian. |
| imageEffects.chromaticAberration.pixels | [0.0, 10.0] | 7.182089257049161 | Applied width of chromatic aberration in pixel. |
| imageEffects.motionBlur.angle | [0.0, 2·pi) | 4.267329531389686 | Used angle for motion blur given in radian. |
| imageEffects.motionBlur.pixels | [0.0, 12.0] | 2.2224869943608034 | Applied width of motion blur in pixel. |
| imageEffects.globalBlurStdDev | 0.4 | 0.4 | Gaussian kernel standard deviation of overall blur added to image. |
| imageEffects.relativeNoiseLevel | [0.0, 0.016] | 0.014196181325255804 | Scales the relative noise. |
| imageEffects.additiveNoiseLevel | [0.0, 0.002] | 0.0014961350727862753 | Scales the additive noise. |
| imageEffects.aecError | [-0.14, 0.14] | -0.018839826406741075 | Automatic exposure correction error. |
| imageEffects.whitePointAccuracy | 0.1 | 0.1 | Accuracy of the white balance (0 = no correction, 1 = gray world). |
| imageEffects.flares | true or false | false | Specifies whether lense flares where simulated or not. |
| imageEffects.digitalImageSharpening.sigma | 1.5 | 1.5 | Gaussian kernel standard deviation applied to receive the blured image for unsharp masking. |
| imageEffects.digitalImageSharpening.strength | 2.0 | 2.0 | Amount of unsharp masking. |
| imageEffects.digitalImageSharpening.threshold | 0.02 | 0.02 | Threshold from which difference between image and blur image the image is digitally sharpened. |
| imageEffects.bayerPattern | true or false | true | Specifies whether bayer pattern artifacts where simulated or not. |
Paper and reference
This work is licensed under Creative Commons Attribution 4.0. ![]()
![]()
To cite this work in your scientific publication, please use the following bibliography entry:
Sielemann, A., Barner, V., Wolf, S., Roschani, M., Ziehn, J., and Beyerer, J. (2025). Measuring the Effect of Background on Classification and Feature Importance in Deep Learning for AV Perception. In 2025 IEEE International Automated Vehicle Validation Conference (IAVVC).
@inproceedings{measuring_effect_of_background_sielemann_2025,
title={{Measuring the Effect of Background on Classification and Feature Importance in Deep Learning for AV Perception}},
author={Sielemann, Anne and Barner, Valentin and Wolf, Stefan and Roschani, Masoud and Ziehn, Jens and Beyerer, Juergen},
booktitle={2025 IEEE International Automated Vehicle Validation Conference (IAVVC)},
year={2025}
}In case of copying and redistributing, or publishing an adapted version of our datasets, please provide the name of our dataset, the creator names, a copyright notice, a link to this website, a license notice with link to the license, and, if changes were made, a disclaimer notice, and a short description of the applied changes. For example, as follows:
This work is based on the Measuring the Effect of Background on Classification and Feature Importance in Deep Learning for AV Perception
by Anne Sielemann, Valentin Barner, Stefan Wolf, Masoud Roschani, Jens Ziehn, and Juergen Beyerer,
© 2025 Fraunhofer IOSB, All rights reserved.
Link: synset.de/datasets/synset-signset-ger/background-effect/
Licence: CC BY 4.0 ![]()
![]()
Disclaimer: The original authors are neither affiliated nor responsible for any applied changes.
Download Dataset Download Paper for Personal Use
Credits
This work was supported by the Fraunhofer Internal Programs under Grant No. PREPARE 40-02702 within the “ML4Safety” project, as well as funded by the German Federal Ministry for Economic Affairs and Climate Action (BMWK) within the program “New Vehicle and System Technologies” as part of the AVEAS research project. The real-world data of worn / dirty traffic signs, used to train the GAN for texture synthesis, was acquired with the kind support of the civil engineering department of the city of Karlsruhe, Germany (Tiefbauamt Karlsruhe).
- S. Lundberg, “A unified approach to interpreting model predictions,” arXiv preprint arXiv:1705.07874, 2017. ↩︎
- R. R. Selvaraju, M. Cogswell, A. Das, R. Vedantam, D. Parikh, and D. Batra, “Grad-cam: Visual explanations from deep networks via gradient-based localization,” in Proceedings of the IEEE international conference on computer vision, 2017, pp. 618–626. ↩︎
- Verkehrszeichen Wissensnetz – stvo2Go ↩︎